JP Technology Initiatives Inc.

Foottroller Technology Overview

The tutorial video explains fundamentals of the Foottroller technology, and the 3-state control process for locomotion control. A recommended watch for Foottroller users and developers. (Download slides)
Key concepts:
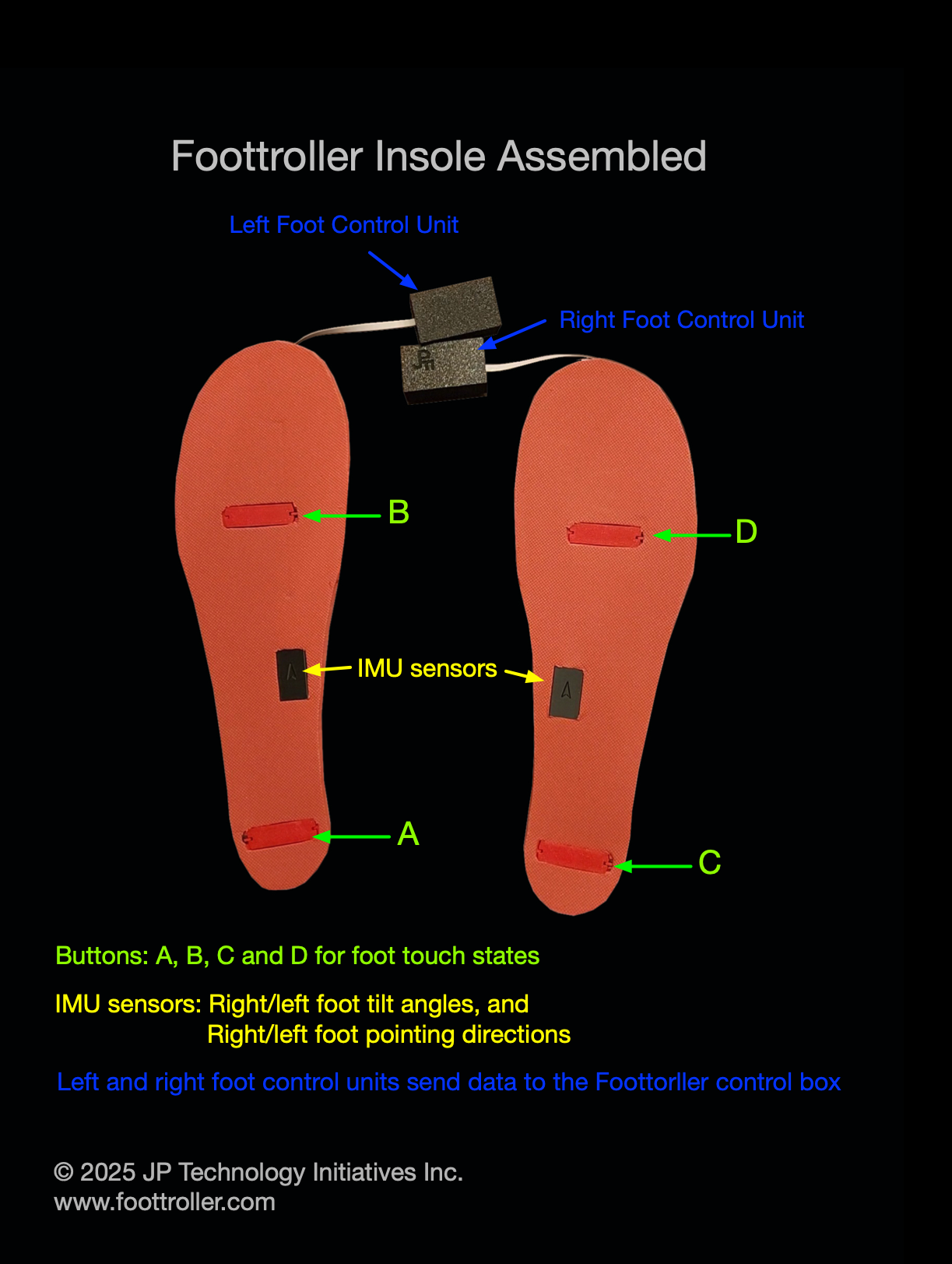
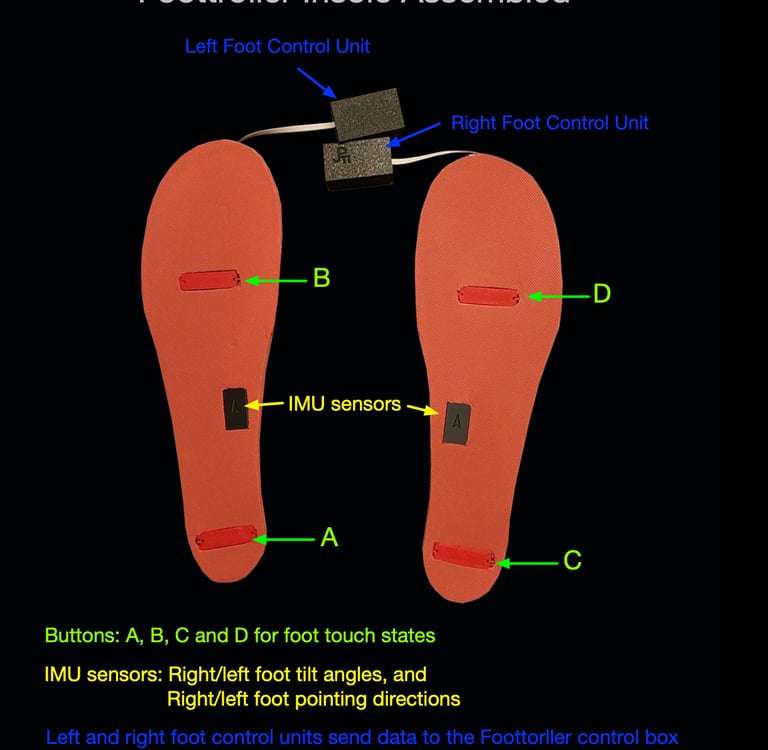
Foottroller control elements:
Foot touch state with buttons A, B, C and D
Foot tilt angles
Foot pointing directions.
Foottroller locomotion as a 3-state control process
S0: stationary state
S1.1: moving state 1 with four-way movement control
S1.2: moving state 2 for walk/run-in-place
The Foottroller system and operation modes
Foottroller insoles
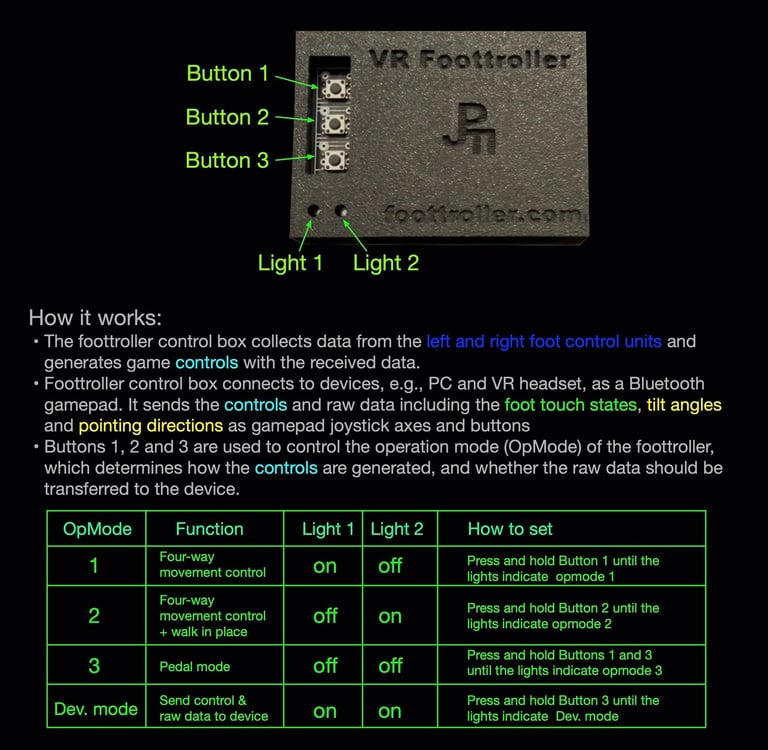
Foottroller control box
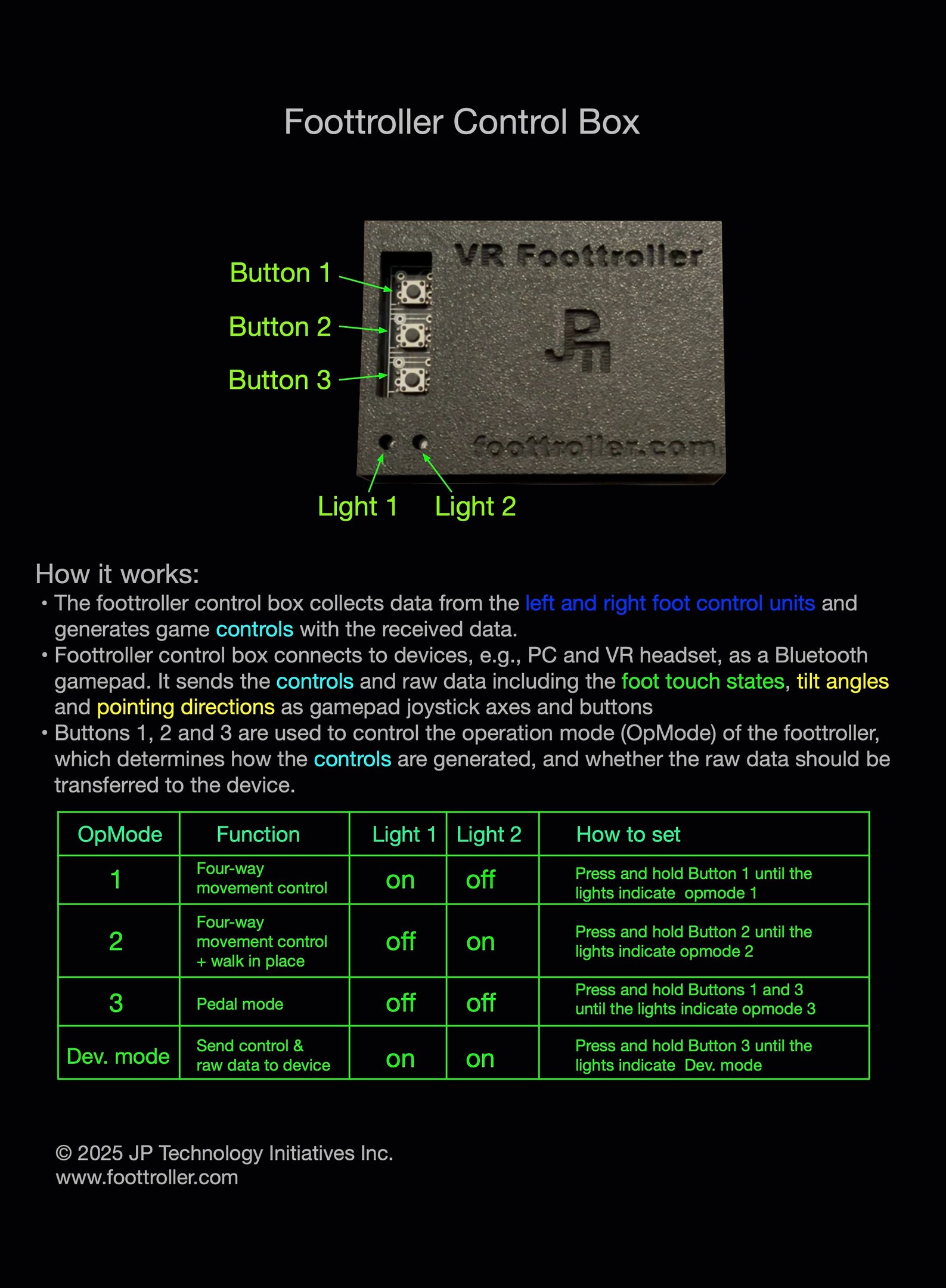
Operation mode 1: Four-way movement control with two control states S0 and S1.1
OpMode 1 for locomotion control has two control states S0 (stationary) and S1.1 (moving state 1)
Instructions:
Start movement (S0 -> S1.1) with four-way movement control:
Move forward: foot touch state ABD & right foot tilt forward
Move backward: foot touch state ABC & right foot tilt backward
Move right: foot touch state BCD & left foot tilt forward
Move left: foot touch state ACD & left foot tilt backward
Speed control in S1.1: use the foot tilt angle of the tilted left/right foot to control movement speed.
Stop movement (S1.1 -> S0): lifting the left foot or the right foot off the ground, or full press with foot touch state ABCD.
Operation mode 2: Four-way movement control + Walk/Run in Place with three control states S0, S1.1 and S1.2
OpMode 2 adds Walk/Run-in-place (control state S1.2) to OpMode 1 for immersive locomotion control, which allows the user to walk/run in virtual environments.
In OpMode 2 only x and y axes are active for lateral and forward/backward movement control
Instructions:
Start movement (control state S0 -> S1.1): same as in OpMode 1 with four-way movement control.
Movement speed control in S1.1: same as in OpMode 1 using foot tilt angle to adjust movement speed.
Start walk/run in place (control state S1.1 -> S1.2): lift the tilted foot off ground and start walk/run in place.
Movement speed control in S1.2: walk/run-in-place consists of switches between left foot steps (standing on the left foot) and right foot steps (standing on the right foot). The movement speed is in S1.2 is controlled by the duration of the left steps and the right steps. Shorter step durations leads to faster movement speed.
Stop the movement (control state S1.2 -> S0): Foot touch state ABCD.
Note that while walking/running in place, i.e., in control state S1.2, the user can have both feet pressing the ground, e.g., with foot touch state ABC, or ABD, which will not stop the movement or change the movement speed. This allows the addition of new controls, e.g., turn controls, with foot gestures while moving.
Operation mode 3: Pedal mode
Operation mode Dev.:
OpMode 3 is for driving games on PC where Foottroller functions as pedals for acceleration and brake control.
In OpMode 3 only Rx and Ry axes of the Foottroller gamepad are active.
When Dev. mode is enabled, Foottroller will send not only the generated locomotion controls but also the raw Foottroller data to the device.
In Dev. mode active Foottroller gamepad axes and buttons are:
x: for lateral movement control
y: for forward and backward movement control
z: left foot tilt angle
Rx: right foot tilt angle
Ry: right foot pointing direction
Rz: left foot pointing direction
Button 1: B
Button 2: A
Button 3: C
Button 4: D
Recommended use: In Dev. mode, developers will have full access to all basic Foottroller control elements to develop customized control functions.
Contact
email:
support@jptiinc.com
© 2025 JP Technology Initiatives Inc. All rights reserved.
address:
JP Technology Initiatives Inc.
45 Colvin Ave, Suite 120
Albany NY 12206 USA